Каталог
Вернуться к результатам поиска
RobSim

Вернуться к результатам поиска
RobSim
Программный комплекс (ПК) RobSim используется в следующих направлениях:
- обучение операторов мобильных роботов, используемых в системе госкорпорации "Росатом" и смежных организаций, основным навыкам работы с ними, отработка типовых манипуляций;
- оперативное создание сцен для отработки технологии ликвидации последствий чрезвычайных происшествий с использованием мобильных роботов.
ПК RobSim даёт возможность новичку освоить основные приемы управления работами на виртуальной сцене. Его использование позволяет существенно ускорить и обезопасить процесс обучения, что, в конечном итоге, существенно сокращает общие затраты. Развитая вычислительная техника и методы математического моделирования обеспечивают возможность для создания комплексов, позволяющих моделировать движение робота и его взаимодействие с элементами сцены с приемлемой правдоподобностью.
Программный комплекс RobSim 5 состоит из следующих компонентов:
- Программная оболочка Robsim5.exe. Оболочка представляет собой интерфейс пользователя для выбора сцен и роботов, участвующих в симуляции, c последующим запуском режима тренировки.
- Подсистема моделирования системы управления CtrlPanelDll.dll предназначена для моделирования структурной логики и пультов систем управления робототехнических средств и манипуляторов.
- Подсистема моделирования динамики UMComSolver.dll предназначена для моделирования динамики сцен в реальном режиме. Программная оболочка конвертирует сцены и роботы из файлов s3d и r3d в формат подсистемы моделирования динамики dat.
- Подсистема визуализации виртуальных сцен ViewWnd.dll предназначена для высококачественной визуализации виртуальных трехмерных сцен в реальном режиме времени.
- Программа CtrlPanel.exe, входящая в состав программного комплекса, предназначена для описания систем управления роботов и сцен.
- Создание моделей сцен и роботов выполняется в программе 3ds Max.
- обучение операторов мобильных роботов, используемых в системе госкорпорации "Росатом" и смежных организаций, основным навыкам работы с ними, отработка типовых манипуляций;
- оперативное создание сцен для отработки технологии ликвидации последствий чрезвычайных происшествий с использованием мобильных роботов.
ПК RobSim даёт возможность новичку освоить основные приемы управления работами на виртуальной сцене. Его использование позволяет существенно ускорить и обезопасить процесс обучения, что, в конечном итоге, существенно сокращает общие затраты. Развитая вычислительная техника и методы математического моделирования обеспечивают возможность для создания комплексов, позволяющих моделировать движение робота и его взаимодействие с элементами сцены с приемлемой правдоподобностью.
Программный комплекс RobSim 5 состоит из следующих компонентов:
- Программная оболочка Robsim5.exe. Оболочка представляет собой интерфейс пользователя для выбора сцен и роботов, участвующих в симуляции, c последующим запуском режима тренировки.
- Подсистема моделирования системы управления CtrlPanelDll.dll предназначена для моделирования структурной логики и пультов систем управления робототехнических средств и манипуляторов.
- Подсистема моделирования динамики UMComSolver.dll предназначена для моделирования динамики сцен в реальном режиме. Программная оболочка конвертирует сцены и роботы из файлов s3d и r3d в формат подсистемы моделирования динамики dat.
- Подсистема визуализации виртуальных сцен ViewWnd.dll предназначена для высококачественной визуализации виртуальных трехмерных сцен в реальном режиме времени.
- Программа CtrlPanel.exe, входящая в состав программного комплекса, предназначена для описания систем управления роботов и сцен.
- Создание моделей сцен и роботов выполняется в программе 3ds Max.

Универсальный механизм
Программный комплекс «Универсальный механизм» - основной продукт Лаборатории. Это специализированное многофункциональное расчетное приложение, предназначенное для решения задач кинематики и динамики механических систем. Комплекс ориентирован на инженеров-исследователей расчетных отделов и бюро. В силу особенностей предметной области требует от пользователя базовых знаний в области теоретической механики, теории машин и механизмов и математического моделирования.
«Универсальный механизм» состоит из ядра (UM Base) и дополнительных опциональных модулей, которые расширяют его функциональность.
Вычислительная Механика
Брянский район, село Глинищево
Произведено в: Брянская область

Fluid WorkBench
Fluid WorkBench (FWB) — программный продукт для расчёта термодинамических свойств, тепло-массообменных транспортных коэффициентов, оптических свойств однородных газов и плазмы в широком диапазоне температур и давлений. Предназначен для инженеров, проводящих CFD моделирование химических процессов, горения, плазмы и микроэлектроники.
Кинтех Лаб
Москва
Произведено в: Москва
Chemical WorkBench
Chemical WorkBench — интегрированный программный комплекс для построения кинетических механизмов и концептуального дизайна физико-химических процессов и устройств на их основе, а также анализа химических механизмов. Основными пользователями являются исследователи и инженеры, разрабатывающие технологии, в основе которых лежат физико-химические превращения, для энергетики, химической технологии, металлургии, микроэлектроники и экологии.
Chemical Workbench использует последовательную пространственно – временную организацию промышленных процессов для построения концептуальной схемы процесса. Концептуальная схема процесса представляет собой последовательно соединенные базовые модели каждой из стадий процесса. Упрощённое описание гидродинамики (0D или 1D) каждой стадии процесса делает возможным моделирование с использованием детальных химических механизмов и позволяет сконцентрироваться на изучении влияния химических эффектов на течение процесса. Библиотека моделей реакторов охватывает химическую кинетику, горение, неравновесную плазму и гетерогенные реакции на границе твёрдое тело – газ и соответствует большинству стандартных экспериментов, используемым для изучения кинетики химических превращений.
Кинтех Лаб
Москва
Произведено в: Москва
Mechanism WorkBench
Mechanism WorkBench - принципиально новый программный продукт, дающий возможность использовать высокую точность детальных кинетических механизмов в массивных инженерных расчётах процессов в реагирующих средах. Используя Mechanism Workbench инженеры значительно повысят точность CFD-моделирования при сохранении времени расчёта.
Кинтех Лаб
Москва
Произведено в: Москва
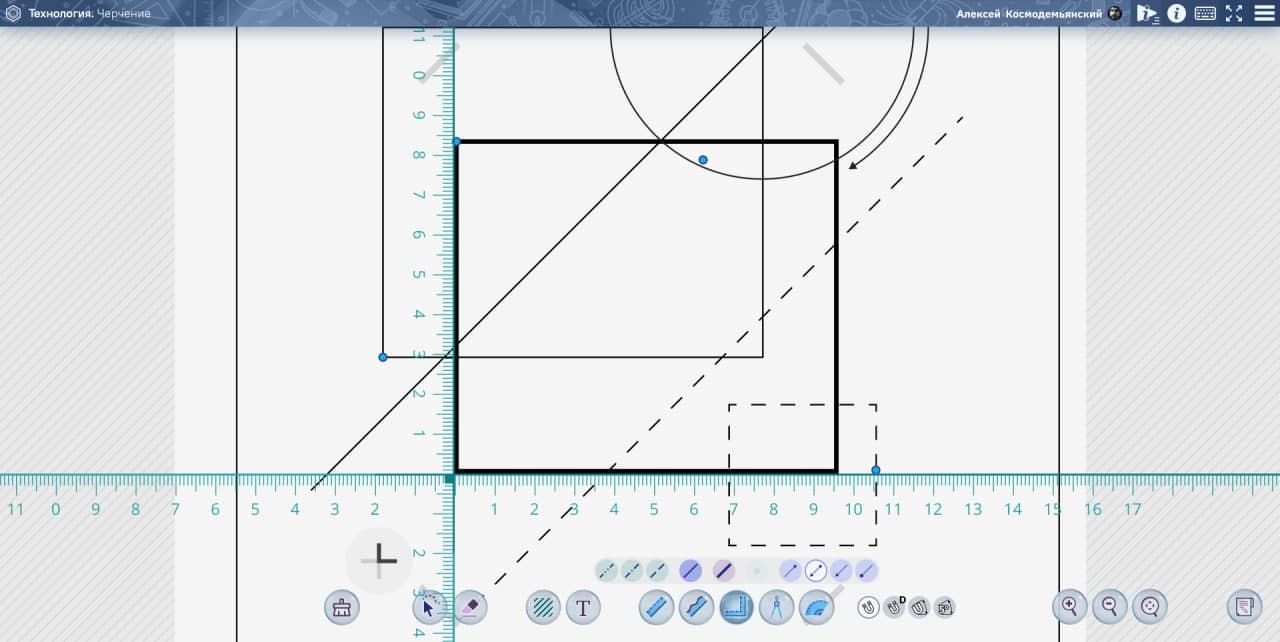
Виртуальная лаборатория «Технология». Черчение
«Виртуальная лаборатория «Технология», раздел «Черчение» позволяет:
Выполнить чертеж различной сложности, используя принципы классического черчения «на бумаге», и приобрести навыки, которые в дальнейшем помогут при моделировании и работе с более сложными системами, например, САПР (системами автоматизированного проектирования).
Чертить в условиях, максимально приближенных к реальным: нарисованное нельзя отменить – только стереть, а чертить линии можно только с помощью соответствующих чертежных инструментов.
Использовать виртуальные инструменты черчения: «Линейку», «Циркуль», «Транспортир», «Кульман».
Визекс Инфо
Москва
Произведено в: Москва
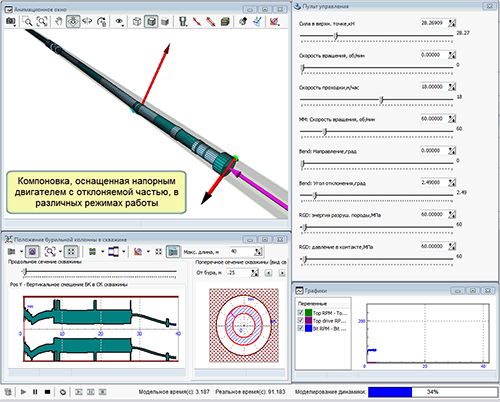
UM Drilling
Специализированное приложение, включающее набор инструментов для решения исследовательских и прикладных инженерных задач, связанных с моделированием поведения бурильной колонны/компоновки низа бурильной колонны (КНБК) в скважине произвольной конфигурации для различных условий эксплуатации.
Приложение ориентировано на использование персоналом бурильных компаний. Инженерная среда обеспечивает задание исходных данных в общепринятом формате для различных типов анализа, запуск решателей (в том числе – решателей сторонних разработчиков), представление и сравнение результатов, формирование отчетов и пр.
В настоящее время в функционал инженерного приложения входят инструменты для статического анализа КНБК (включая инструментария для описания моделей РУС, напорных двигателей и пр. элементов компоновки), Torque&Drag анализа бурильной колонны, а также анализа динамики БК.
- Torque&Drag - Анализ моментов и сил сопротивления на колонне
Оценка крутящих моментов и сил, возникающих в буровых или обсадных колоннах при различных технологических операциях на скважине: спускоподъемные операции, бурение с/без вращения колонны, вращение над забоем, расширительные работы, работы по подъему утерянного оборудования и пр. Определение критических эксплуатационных параметров, приводящих к потере устойчивости колонны в скважине произвольной конфигурации.
- Статический анализ
Исследование деформированного состояния КНБК в скважине произвольной конфигурации на основании расчета равновесного положения модели; анализ контактных сил, действующих со стороны стенок скважины на колонну, а также внутренних силовых факторов и напряжений, возникающих в элементах колонны в различных условиях эксплуатации.
- Вибрационный анализ
Линейный вибрационный анализ
Нелинейный вибрационный анализ
- Анализ динамики КНБК / бурильной колонны
Вычислительная Механика
Брянский район, село Глинищево
Произведено в: Брянская область
Универсальный механизм Lite
Схема работы программы такова:
Сначала исследователь описывает механическую систему как систему тел, соединенных шарнирами и силовыми элементами. Далее программа автоматически строит уравнения движения системы и численно их решает либо во временной либо в частотной области.
В процессе численного решения поддерживается непосредственная анимация движения модели. В процессе расчета для анализа доступны практически все необходимые величины: координаты, скорости, ускорения, силы реакций в шарнирах, усилия в пружинах и т.д.
Поддерживается импорт данных из следующих CAD-программ: КОМПАС-3D, SolidWorks и Autodesk Inventor. Таким образом UM Lite можно рассматривать как недорогое приложение для анализа кинематики и динамики систем, спроектированных в упомянутых выше CAD-программах.
Программа UM Lite предоставляет пользователю набор инструментов для создания динамического объекта - системы тел - и последующего анализа его динамических, кинематических и статических свойств.
Вычислительная Механика
Брянский район, село Глинищево
Произведено в: Брянская область
CAE Fidesys
Пакет CAE Fidesys предназначен для инженерного анализа прочности и решения геомеханических задач.
С помощью пакета производится оценка надежности и ресурса механических конструкций, а также предиктивный анализ эффективности и безопасности проведения работ при добыче полезных ископаемых.
Пакет CAE Fidesys используется в машиностроении (авиастроение, космическая промышленность, судостроение, двигателестроение, автостроение и т.д.), нефтегазовой и горнодобывающей промышленности, медицине и других отраслях.
Фидесис
Москва
Произведено в: Москва

СПРУТ-АЭД
Предлагаемая серия программ «СПРУТ-АЭД», позволяет успешно решить задачи электромагнитного расчета трехфазных асинхронных двигателей с короткозамкнутым ротором, асинхронных конденсаторных двигателей, задачи тепловентиляционного расчета закрытых асинхронных двигателей с ротором КЗ и экспериментального активного электрода АЭД.
Виды расчета асинхронных электродвигателей:
Электромагнитный расчет трехфазных асинхронных электродвигателей
Электромагнитный расчет однофазных АЭД с ротором КЗ
Тепловентиляционный расчет электрических машин малой и средней мощности
Расчет виброакустической характеристики АЭД с ротором КЗ
Центр СПРУТ-Т
Москва
Произведено в: Москва

Интерактивные приложения дополненной и виртуальной реальности
Приложения представляют из себя интерактивную презентацию модели в 3D-пространстве, с возможностью изменять масштаб модели, вращать ее, двигаться вокруг модели, перемещаться к заранее заданным точкам.
ЦПТИ
Москва

FlowVision
FlowVision – программный комплекс, предназначенный для конструкторов, инженеров и технологов для решения задач гидрогазодинамики, теплообмена, горения и взаимодействия жидкости и деформируемых конструкций. Более 20 лет FlowVision применяется в двигателе- и турбомашиностроении, судостроении, в энергетике и металлургии, в авиакосмической, автомобильной, атомной, нефтегазовой, химической и других отраслях промышленности.
В основе FlowVision лежат численные решения трехмерных стационарных и нестационарных уравнений динамики жидкости и газа, включающие в себя законы сохранения массы, импульса (уравнения Навье-Стокса), уравнения состояния. Для расчета сложных движений жидкости и газа, сопровождаемых дополнительными физическими явлениями (турбулентность, горение, контактные границы раздела, пористость среды, теплоперенос и т.д.), в математическую модель включаются дополнительные уравнения, описывающие эти явления. FlowVision использует конечно-объемный подход для аппроксимации уравнений математической модели. Уравнения Навье-Стокса решаются методом расщепления по физическим процессам (проекционный метод MAC).
Адванс Инжиниринг
Москва
Произведено в: Москва

РеВерсия
Программный продукт РеВерсия® позволяет построить полигональную модель на базе данных 3D-сканирования и подготовить полигональную модель к последующей параметризации.
Автоматическая параметризация полигональных сеток реализована с помощью встроенного в РеВерсию инструмента “Авто Реверс” для параметризации всей сетки или её фрагмента.
В зависимости от качества исходной сетки, полученная модель будет представлена NURBS-патчами и/или аналитической геометрией (Плоскости, Цилиндры, Сферы, Конусы, Экструзии, Тела вращения, Торы и т.д.).
В продукте реализован инструмент ручной подгонки параметрических поверхностей NURBS-типа и аналитического типа к полигональной сетке.
Программный продукт РеВерсия® поддерживает множество цифровых форматов представления модели:
Облако точек: TXT, XYZ, CSV, ASC, TZR, TPR, QIF
Полигональные модели: STL, PLY, AMF, 3MF, QIF, INP
Параметрическая модель: STEP (v242, v214, v204), IGES, VDA-FS, QIF
Тесис
Москва
Произведено в: Москва
ЛОГОС
ЛОГОС является эффективным инструментом инженера для решения широкого спектра расчетных задач - проведения поверочных расчетов, исследования оптимальных вариантов конструкции, подтверждения конструкторских решений и проведения комплексных виртуальных испытаний.
Пакет программ ЛОГОС позволяет моделировать процессы аэро-, гидро- и газодинамики, распространения тепла в твёрдом теле, тепловой конвекции, переноса излучения, напряжения, деформации и разрушения конструкций, а также взаимодействие перечисленных физических процессов между собой.
В ЛОГОС реализованы численные методы расчетов с использованием неструктурированных и структурированных сеток. В состав пакета входит препостпроцессор, предназначенный для импорта и обработки CAD/FEM/CFD-моделей, генерации поверхностных и объемных сеток, имеющий визуальную среду для подготовки и постобработки расчетной модели.
ФГУП «РФЯЦ-ВНИИЭФ»
Саров
Произведено в: Саров
FSI (Fluid Structure Interaction)
FSI позволяет моделировать взаимодействия жидкости и конструкций в нестационарной постановке, решать междисциплинарные задачи гидро- и аэроупругости, в том числе, для 2-х фазной среды (вода + воздух), учитывать сильное и слабое взаимодействие между жидкостью и конструкцией, включая сопряженный теплообмен и термопрочность.
FSI, осуществляющий интеграцию прочностных программных комплексов и программы решения задач аэро-гидродинамики FlowVision.
Совместный FSI-расчет без программ-посредников доступен для следующих конечно-элементных пакетов:
- SIMULIA Abaqus
- MSC Nastran
- APM WinMachine
- FIDESYS
Области применения FSI в различных отраслях:
в авиации:
- аэрогидроупругость элементов конструкции,
- бафтинг и флаттер крыла летательных аппаратов или лопаток турбореактивных двигателей
- взлет и посадка гидросамолетов с учетом поведения конструкции
- аварийное приземление и приводнение вертолетов с использованием эластичных пневмобаллонов
- и многие другие задачи
в автомобильной и шинной промышленностях:
- аквапланирование колеса
- моделирование работы эластичных уплотнений
- динамические нагружение и деформация спойлеров и других выступающих частей
- срабатывание автомобильной подушки безопасности
в судостроении:
- аэрогидродинамика судов на воздушной подушке с эластичными юбками или ограждениями
- прочность конструкции корпусов скоростных судов при волновом ударе
- гидроупругость водометного движителя, в том числе, при щелевой кавитации
- сход судна со стапелей в воду
- падение грузов в воду
в двигателестроении, производстве турбомашин, ветряков:
- сопряженный теплообмен и термопрочность деталей и агрегатов
- деформация лопаток турбин и компрессоров потоком газа и центробежной силой
- масляные уплотнения
в медицине:
- моделирование работы сердечно-сосудистой системы
- движение/деформации сердечных клапанов
- моделирование стентов
- работа АВК (аппаратов вспомогательного кровообращения)
в строительстве:
- ветровая нагрузка на высотные здания и сооружения
- прочность остекления и пр.
Тесис
Москва
Произведено в: Москва

APM Multiphysics
CAE-система автоматизированного расчета и проектирования конструкций позволяет пользователю решать различные мультифизические задачи для более точной оценки совместного влияния процессов разной физической природы на объект расчета.
Возможности продукта:
Моделирование физических процессов;
- стационарная и нестационарная теплопроводность;
- анализ течений жидкостей и газов;
- расчет электромагнитных полей;
- расчет электрических цепей.
Мультифизический анализ
- Расчет НДС + теплопроводность;
- Расчет НДС + течение жидкостей и газов;
- Расчет НДС + теплопроводность + течение жидкостей и газов.
Расчеты на прочность конструкций
- анализ напряженно-деформированного состояния (статика);
- устойчивость;
- нелинейный анализ;
- вынужденные колебания;
- трещиностойкость;
- усталость.
Проектировочные и проверочные расчеты:
- деталей машин и соединений
- механические передачи;
- валы и оси;
- подшипники качения;
- подшипники скольжения;
- упругие элементы машин;
- кулачковые механизмы;
- передачи поступательного движения;
- болтовые, заклепочные, сварные соединения, а также соединения тел вращения.
Генерация сеток конечных элементов
- автоматическая генерация сеток КЭ на поверхностных и твердотельных 3D-моделях;
- постоянный либо переменный (адаптивный) шаг разбиения;
- доп. функции предразбиения ребер и поверхностей;
- возможность «ручной» правки созданной КЭ-сетки;
- работа со стержневыми, пластинчатыми и твердотельными КЭ.
НТЦ «АПМ»
Королев
Произведено в: Королев
APM WinMachine
Российская CAE-система автоматизированного расчета и проектирования механического оборудования и конструкций в области машиностроения, разработанная с учетом последних достижений в вычислительной математике, области численных методов и программирования, а также теоретических и экспериментальных инженерных решений.
Отличительной особенностью APM WinMachine является вертикально-интегрированная структура компоновки продукта, что позволяет разработчикам организовывать бесшовные связки между расчетными модулями для решения сложных производственных задач.
Программный продукт APM WinMachine построен по модульной схеме, что обеспечивает удобство его использования под узконаправленные отраслевые задачи машиностроения.
НТЦ «АПМ»
Королев
Произведено в: Королев