Каталог
Поиск
4 тов.
Вид:
4 тов.

Универсальный механизм
Программа ориентирована на инженеров-практиков, студентов и преподавателей вузов, всех, кто сталкивается с проблемами исследования динамического поведения машин и механизмов. Механизмы описываются как системы твердых тел, шарниров и силовых элементов.
Поддерживается непосредственная анимация движения вашей модели в процессе расчета. Для анализа доступны практически все необходимые величины: координаты, скорости, ускорения, силы реакций в шарнирах, усилия в пружинах и т.д.
Развитый постпроцессор: линейный анализ, статистический анализ, многовариантные расчеты, экспорт результатов. Это эффективный инструмент для моделирования динамики различных машин и механизмов: космических конструкций, роботов и манипуляторов, железнодорожных экипажей, автомобилей, кабелей и т.д. Решение прямой и обратной задач кинематики и динамики.
UM включает в себя ядро и ряд дополнительных модулей, расширяющих функциональность ядра: автомобильный модуль (UM Automotive), железнодорожный модуль (UM Loco), модуль моделирования гусеничных машин (UM Tracked Vehicle), модуль импорта из CAD программ (UM CAD Interfaces), модуль моделирования упругих тел (UM FEM), модуль многовариантных расчетов и оптимизации UM Experiments, модуль связи с Matlab/Simulink UM Control и другие.
Тела
- Тела произвольной формы
- Автоматический расчет инерционных параметров и положения центра масс
Шарниры и связи
- Вращательный, поступательный, цилиндрический, Кардано, обобщенный, кватернионный шарниры
- Связь в виде невесомого стержня
Силы
- Общие, биполярные, контактные, специальные и другие описанные пользователем силы
Графические элементы
- Полиэдр, эллипс, параллелепипед, винтовая линия эллипсоид, конус, параметрический, профильный
- Импорт ASC и 3DS файлов, КОМПАС, SolidWorks, Autodesk Inventor, Unigraphics NX и Pro/ENGINEER
Измеряемые величины
- Угловые и линейные координаты, скорости, ускорения
- Активные силы и моменты
- Силы реакции
- Другие величины, определенные пользователем
Управление моделированием
- Запуск, пауза, продолжение, остановка моделирования в любое время
- Контроль точности решения
Поддержка разработки модулей пользователя с использованием компиляторов:
- MS Visual C++
- Borland C++ Builder
- Borland Delphi
- любые другие языки программирования, поддерживающие создание динамически загружаемых библиотек (DLL)
Визуализация
- Анимация объектов
- Траектории точек
- Линейные и угловые скорости и ускорения в виде векторов
- Все измеряемые величины в виде графиков
Импорт
- 3DS файлы
- ASC файлы
- Детали и сборки из КОМПАС, SolidWorks, Autodesk Inventor, Unigraphics NX и Pro/ENGINEER (графические образы, инерционные параметры тел, сопряжения), подробнее
- Модели из Matlab/Simulink, подробнее
Вычислительная Механика
Брянский район, село Глинищево
Произведено в: Брянская область
Универсальный механизм Lite
Схема работы программы такова:
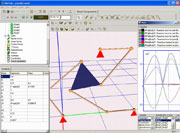
Сначала исследователь описывает механическую систему как систему тел, соединенных шарнирами и силовыми элементами. Далее программа автоматически строит уравнения движения системы и численно их решает либо во временной либо в частотной области.
В процессе численного решения поддерживается непосредственная анимация движения модели. В процессе расчета для анализа доступны практически все необходимые величины: координаты, скорости, ускорения, силы реакций в шарнирах, усилия в пружинах и т.д.
Поддерживается импорт данных из следующих CAD-программ: КОМПАС-3D, SolidWorks и Autodesk Inventor. Таким образом UM Lite можно рассматривать как недорогое приложение для анализа кинематики и динамики систем, спроектированных в упомянутых выше CAD-программах.
Программа UM Lite предоставляет пользователю набор инструментов для создания динамического объекта - системы тел - и последующего анализа его динамических, кинематических и статических свойств.
Вычислительная Механика
Брянский район, село Глинищево
Произведено в: Брянская область

RobSim
Программный комплекс (ПК) RobSim используется в следующих направлениях:
- обучение операторов мобильных роботов, используемых в системе госкорпорации "Росатом" и смежных организаций, основным навыкам работы с ними, отработка типовых манипуляций;
- оперативное создание сцен для отработки технологии ликвидации последствий чрезвычайных происшествий с использованием мобильных роботов.
ПК RobSim даёт возможность новичку освоить основные приемы управления работами на виртуальной сцене. Его использование позволяет существенно ускорить и обезопасить процесс обучения, что, в конечном итоге, существенно сокращает общие затраты. Развитая вычислительная техника и методы математического моделирования обеспечивают возможность для создания комплексов, позволяющих моделировать движение робота и его взаимодействие с элементами сцены с приемлемой правдоподобностью.
Программный комплекс RobSim 5 состоит из следующих компонентов:
- Программная оболочка Robsim5.exe. Оболочка представляет собой интерфейс пользователя для выбора сцен и роботов, участвующих в симуляции, c последующим запуском режима тренировки.
- Подсистема моделирования системы управления CtrlPanelDll.dll предназначена для моделирования структурной логики и пультов систем управления робототехнических средств и манипуляторов.
- Подсистема моделирования динамики UMComSolver.dll предназначена для моделирования динамики сцен в реальном режиме. Программная оболочка конвертирует сцены и роботы из файлов s3d и r3d в формат подсистемы моделирования динамики dat.
- Подсистема визуализации виртуальных сцен ViewWnd.dll предназначена для высококачественной визуализации виртуальных трехмерных сцен в реальном режиме времени.
- Программа CtrlPanel.exe, входящая в состав программного комплекса, предназначена для описания систем управления роботов и сцен.
- Создание моделей сцен и роботов выполняется в программе 3ds Max.
Вычислительная Механика
Брянский район, село Глинищево
Произведено в: Брянская область
UM Drilling
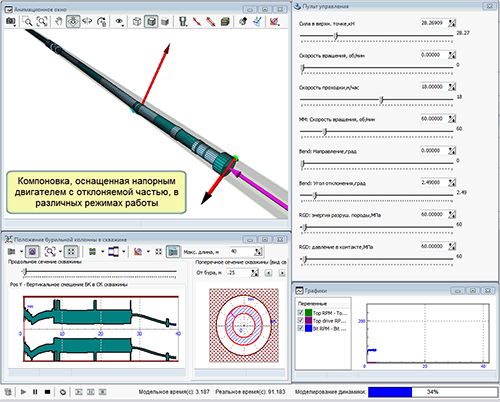
Специализированное приложение, включающее набор инструментов для решения исследовательских и прикладных инженерных задач, связанных с моделированием поведения бурильной колонны/компоновки низа бурильной колонны (КНБК) в скважине произвольной конфигурации для различных условий эксплуатации.
Приложение ориентировано на использование персоналом бурильных компаний. Инженерная среда обеспечивает задание исходных данных в общепринятом формате для различных типов анализа, запуск решателей (в том числе – решателей сторонних разработчиков), представление и сравнение результатов, формирование отчетов и пр.
В настоящее время в функционал инженерного приложения входят инструменты для статического анализа КНБК (включая инструментария для описания моделей РУС, напорных двигателей и пр. элементов компоновки), Torque&Drag анализа бурильной колонны, а также анализа динамики БК.
- Torque&Drag - Анализ моментов и сил сопротивления на колонне
Оценка крутящих моментов и сил, возникающих в буровых или обсадных колоннах при различных технологических операциях на скважине: спускоподъемные операции, бурение с/без вращения колонны, вращение над забоем, расширительные работы, работы по подъему утерянного оборудования и пр. Определение критических эксплуатационных параметров, приводящих к потере устойчивости колонны в скважине произвольной конфигурации.
- Статический анализ
Исследование деформированного состояния КНБК в скважине произвольной конфигурации на основании расчета равновесного положения модели; анализ контактных сил, действующих со стороны стенок скважины на колонну, а также внутренних силовых факторов и напряжений, возникающих в элементах колонны в различных условиях эксплуатации.
- Вибрационный анализ
Линейный вибрационный анализ
Нелинейный вибрационный анализ
- Анализ динамики КНБК / бурильной колонны
Вычислительная Механика
Брянский район, село Глинищево
Произведено в: Брянская область