В настоящее время портал работает - ведутся технические работы.
目录

返回搜索结果
运动传感器汽车DPA-3M

除了基本套件和一组天线块外,georadar套件的一个重要部分是一套各种配件,其中包括运动传感器,电池电源和充电器,各种用途的电缆,运输组件以及其他有 除了基本套件和一组天线块外,georadar套件的一个重要部分是一套各种配件,其中包括运动传感器,电池电源和充电器,各种用途的电缆,运输组件以及其他有
IP路径计
除了基本套件和一组天线块外,georadar套件的一个重要部分是一套各种配件,其中包括运动传感器,电池电源和充电器,各种用途的电缆,运输组件以及其他有
LOGISTICHESKIE SISTEMY
Ramenskoye
生产于: 莫斯科地区, 拉缅斯科耶

DP-32U位移传感器
除了基本套件和一组天线块外,georadar套件的一个重要部分是一套各种配件,其中包括运动传感器,电池电源和充电器,各种用途的电缆,运输组件以及其他有
LOGISTICHESKIE SISTEMY
Ramenskoye
生产于: 莫斯科地区, 拉缅斯科耶

雷达探测器RO-4002D
雷达探测器是采用GPR技术开发的设备,设计
通过无线电透明屏障(砖,钢筋混凝土,木制等)扫描时检测移动物体。 通过运动和呼吸;
用于进行搜索操作,以便检测缓存,缓存,隧道,地下通道和通信,犯罪埋葬,爆炸物书签。
LOGISTICHESKIE SISTEMY
Ramenskoye
生产于: 莫斯科地区, 拉缅斯科耶

组合式选择性双通道探雷器PPO-2I
组合式选择性双通道地雷探测器PPO-2I旨在探测金属和非金属外壳中的工程弹药,以及位于非导电介质(土壤,雪,淡水等)中的各种尺寸的金属和非金属).
该设备可以作为金属探测器,作为探地雷达,以及以组合模式(联合金属探测器和探地雷达)工作。
该设备根据有色金属/黑色金属的特性提供金属物体的选择。
LOGISTICHESKIE SISTEMY
Ramenskoye
生产于: 莫斯科地区, 拉缅斯科耶

通用GPR基本集"OKO-3"
基本GPR套件是一套电子元件,组件和附件,永久和不变的各种GPR配置。 各种天线块和附件集连接到基本集,根据正在解决的任务进行选择。
LOGISTICHESKIE SISTEMY
Ramenskoye
生产于: 莫斯科地区, 拉缅斯科耶
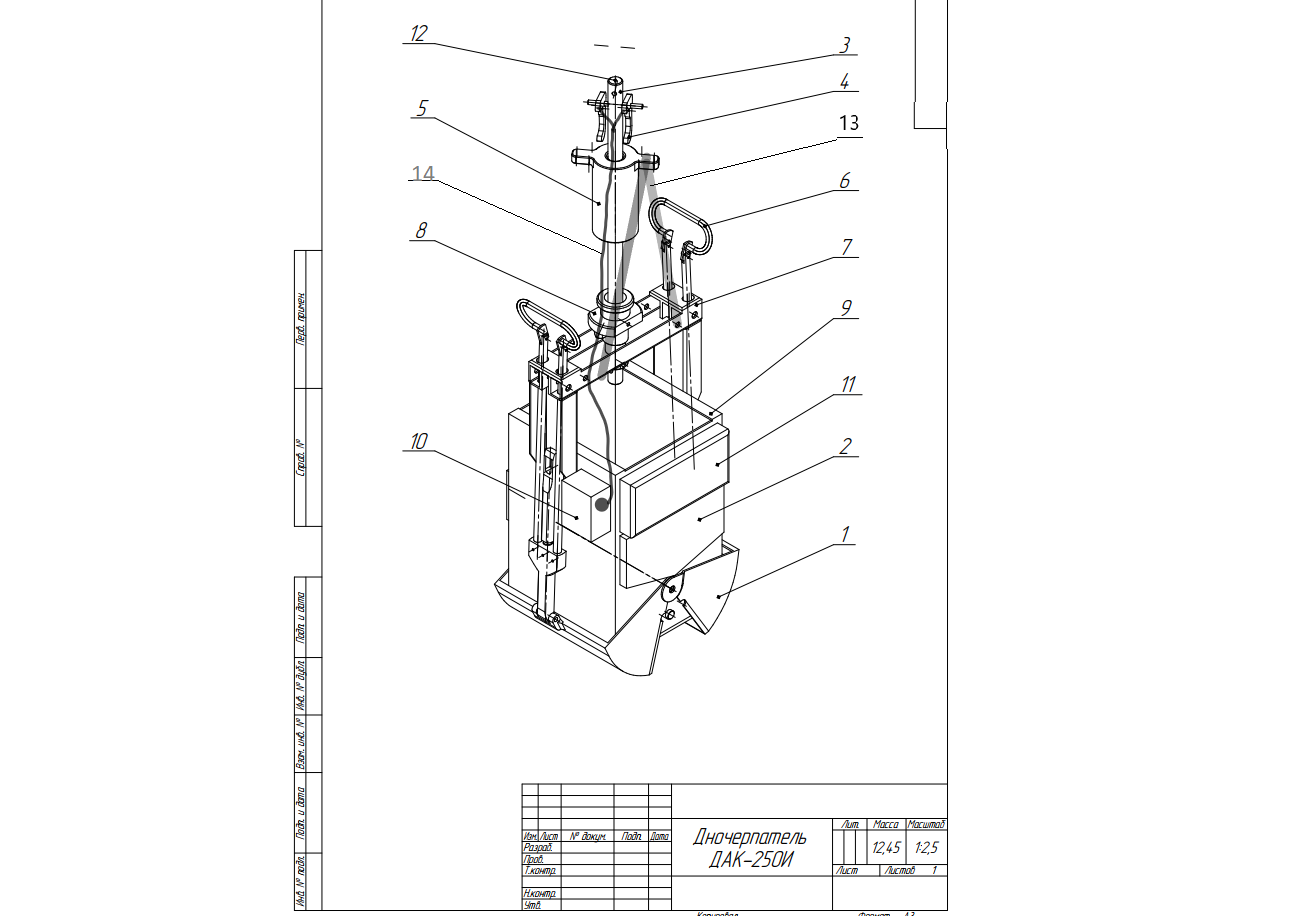
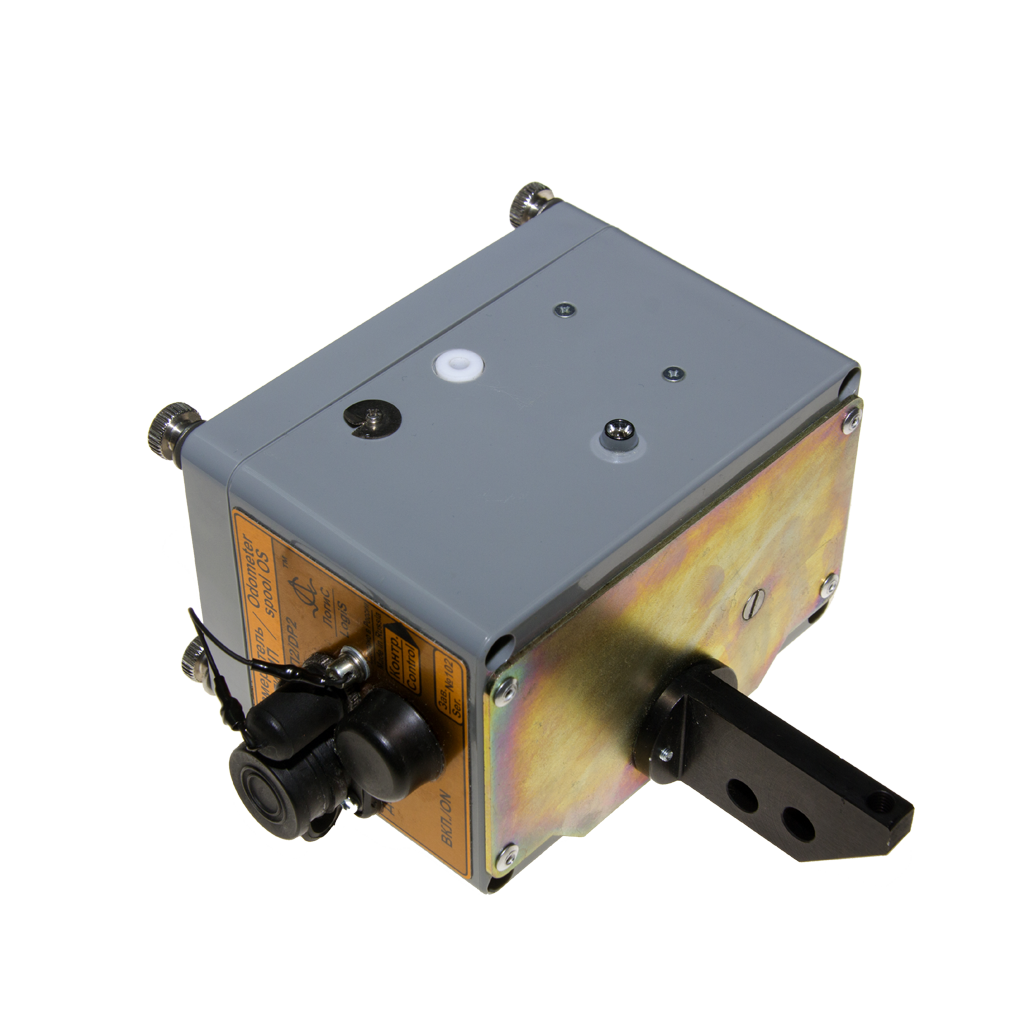
挖泥船DAK-250-I01
从
90 000 ₽
现代化的 DAK-250 型挖泥船(Erkman-Berge)配备了自主控制和数据记录系统,该系统由以下主要部件组成:带微控制器(ESP-32)和一组传感器(加速度计、测深传感器、数字温度计)的电路板、执行器(伺服驱动器)、锂离子电池。挖泥船还配备了稳定水动力元件。通过蓝牙无线接口或电容式按钮与用户互动。所有元件都是密封的,可在水深达 300 米的淡水和海水中使用。微控制器根据预先选择的四种情况之一,根据传感器的数据确定接触地面的时刻,记录设备的制动过程和随后的摆动(以 180 Hz 的频率沿三个轴加速和旋转,并确定初步数字滤波和深度变化),对其进行分析,并在正确埋入地下的情况下,自主发出转动伺服驱动器的指令,从而启动激活挖泥船夹具的常规机制以采集样本,这意味着挖泥船未被使用。在采样过程中,会生成一个包含以下信息的文件: 采样深度(精度可达 1 厘米)、挖泥船进入底层地面时的偏离角度、挖泥船在地面制动和随后摆动的加速度图(可根据创建的对应基础自动分析地面类型/子类型),以及从底层到表面深度的水温值(深度为 1 米,测量为均匀上升); 数据存储在微控制器的闪存中,并通过无线接口传输给船上的用户。
所创建的自主控制和数据收集系统可以大大简化和加快 DAK-250 型挖泥船(Erkman-Berge)的海底取样工作,保证从指定区域采集土壤的正确性,在任何天气条件下都可以进行工作,无需强制船只抛锚,考虑到水域工作的高成本,可以获得显著的经济效益。该设备使用传统的绳索和绞盘自动运行(也可手动下潜/提升),在绝大多数情况下,工作以 "快速下潜到底部,然后提升并取样 "的模式进行,这大大降低了对操作员资质的要求,并加快了取样过程。控制系统完全不影响挖泥船简单可靠的结构,通过机械指令触发(模拟传统设计中绳索上的发送载荷到达),因此现有的多种技术可以正确地转移到改进后的设备上。
SPB FITS RAN
Saint Petersburg
生产于: 雅罗斯拉夫尔, 圣彼得堡

双通道通用基本套GPR"Oko-3"
基本GPR套件是一套电子元件,组件和附件,永久和不变的各种GPR配置。 各种天线块和附件集连接到基本集,根据正在解决的任务进行选择。
LOGISTICHESKIE SISTEMY
Ramenskoye
生产于: 莫斯科地区

GPR"OKO-3"
Georadar是一种现代地球物理仪器,旨在检测各种物体,包括各种环境中的非金属物体。 移动性,比较紧凑性和对环境进行高细节无损监测的能力使其在地球物理设备中独一无二。
Georadars用于解决工程-地质,水文地质和搜索任务,例如:
公路、铁路路堤、跑道机场的检查;
搜索埋藏的局部和扩展对象;
工程结构检查;
建筑结构的调查,包括铁混凝土等.;
地质结构测绘;
冰盖厚度的测定;
油藏调查及底部沉积物测绘;
确定季节性冻融层的厚度,划定永久冻土区,塔里克斯等。;
考古任务;
特殊任务。
LOGISTICHESKIE SISTEMY
Ramenskoye
生产于: 莫斯科地区, 拉缅斯科耶

高频电力勘探站"织女星"
高频电勘探站"Vega"设计用于使用仿形方法进行电勘探,即非接触法。 它的使用在接地工作困难的情况下尤其重要,例如在冷冻土壤或硬质人造复盖物(钢筋混凝土,沥青等)的条件下。).
Vega station中包含的设备采用防尘和防喷外壳制成,可在恶劣条件和宽温度范围内运行。
LOGISTICHESKIE SISTEMY
Ramenskoye
生产于: 莫斯科地区, 拉缅斯科耶

GEORADAR复合体"GEOCART2D"
GeoCart2D georadar复合体是一个OKO—3georadar,配备了许多技术手段,极大地促进了地面区域调查的进行,创建了一个剖面系统,允许您构建和可视化所研究区域的三维模
LOGISTICHESKIE SISTEMY
Ramenskoye
生产于: 莫斯科地区, 拉缅斯科耶

金属探测器深MG-1I
MG-1I深金属探测器是一种可穿戴的自动化技术工具,旨在探测深达5.0米的埋藏弹药、大中型金属物体。
该装置的工作原理是基于瞬变的感应脉冲法,其实质是通过脉冲初级(探测)磁场测量在搜索对象的金属部件中感应(感应)的涡流的次级磁场。
LOGISTICHESKIE SISTEMY
Ramenskoye
生产于: 莫斯科地区, 拉缅斯科耶

组合式选择性双通道探雷器"PPO-3"
组合选择性双通道地雷探测器"PPO-3"旨在探测金属和非金属炮弹中的工程弹药,以及位于非导电介质(土壤,雪,淡水等)中的各种尺寸的金属和非金属物体。).
该设备可以作为金属探测器(MD),作为探地雷达(GRL),作为有线控制线(DL)的探测器,以及组合模式(金属探测器和georadar一起)。
LOGISTICHESKIE SISTEMY
Ramenskoye
生产于: 莫斯科地区, 拉缅斯科耶
