目录
返回搜索结果
挖泥船DAK-250-I01
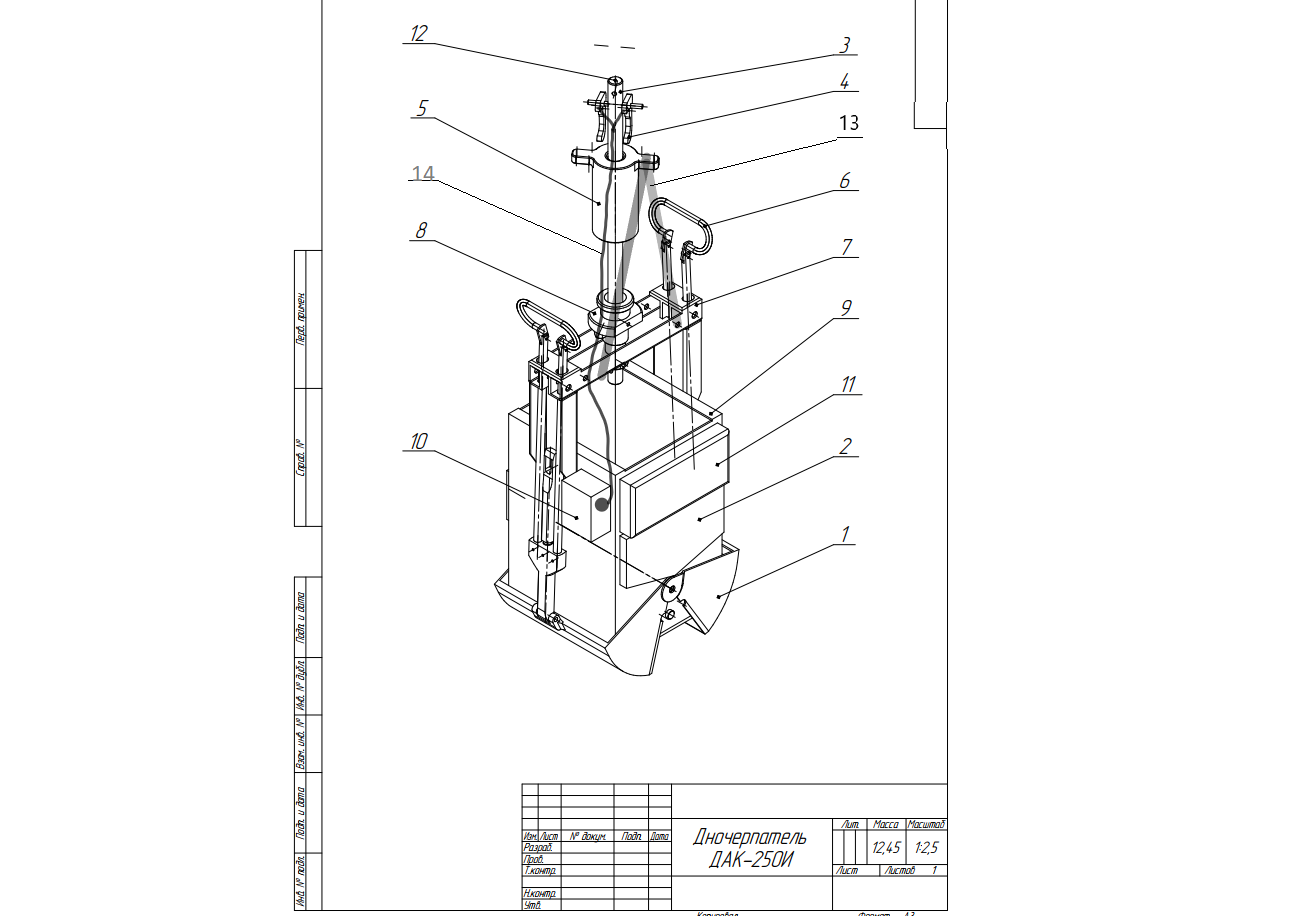
现代化的 DAK-250 型挖泥船(Erkman-Berge)配备了自主控制和数据记录系统,该系统由以下主要部件组成:带微控制器(ESP-32)和一组传感器(加速度计、测深传感器、数字温度计)的电路板、执行器(伺服驱动器)、锂离子电池。挖泥船还配备了稳定水动力元件。通过蓝牙无线接口或电容式按钮与用户互动。所有元件都是密封的,可在水深达 300 米的淡水和海水中使用。微控制器根据预先选择的四种情况之一,根据传感器的数据确定接触地面的时刻,记录设备的制动过程和随后的摆动(以 180 Hz 的频率沿三个轴加速和旋转,并确定初步数字滤波和深度变化),对其进行分析,并在正确埋入地下的情况下,自主发出转动伺服驱动器的指令,从而启动激活挖泥船夹具的常规机制以采集样本,这意味着挖泥船未被使用。在采样过程中,会生成一个包含以下信息的文件: 采样深度(精度可达 1 厘米)、挖泥船进入底层地面时的偏离角度、挖泥船在地面制动和随后摆动的加速度图(可根据创建的对应基础自动分析地面类型/子类型),以及从底层到表面深度的水温值(深度为 1 米,测量为均匀上升); 数据存储在微控制器的闪存中,并通过无线接口传输给船上的用户。
所创建的自主控制和数据收集系统可以大大简化和加快 DAK-250 型挖泥船(Erkman-Berge)的海底取样工作,保证从指定区域采集土壤的正确性,在任何天气条件下都可以进行工作,无需强制船只抛锚,考虑到水域工作的高成本,可以获得显著的经济效益。该设备使用传统的绳索和绞盘自动运行(也可手动下潜/提升),在绝大多数情况下,工作以 "快速下潜到底部,然后提升并取样 "的模式进行,这大大降低了对操作员资质的要求,并加快了取样过程。控制系统完全不影响挖泥船简单可靠的结构,通过机械指令触发(模拟传统设计中绳索上的发送载荷到达),因此现有的多种技术可以正确地转移到改进后的设备上。
所创建的自主控制和数据收集系统可以大大简化和加快 DAK-250 型挖泥船(Erkman-Berge)的海底取样工作,保证从指定区域采集土壤的正确性,在任何天气条件下都可以进行工作,无需强制船只抛锚,考虑到水域工作的高成本,可以获得显著的经济效益。该设备使用传统的绳索和绞盘自动运行(也可手动下潜/提升),在绝大多数情况下,工作以 "快速下潜到底部,然后提升并取样 "的模式进行,这大大降低了对操作员资质的要求,并加快了取样过程。控制系统完全不影响挖泥船简单可靠的结构,通过机械指令触发(模拟传统设计中绳索上的发送载荷到达),因此现有的多种技术可以正确地转移到改进后的设备上。



EVRAZKOMB - 二合一
应用:氧气转炉、电弧炉、感应炉、浇包
测量范围:1400 至 1800°C - 金属温度
精度:1554°C 时 0 + 3°C
所选金属模具形状:
圆形:厚度12mm
椭圆形:厚度12毫米
脱氧剂:无脱氧剂、铝、锆、钛
测量时间:8秒
管长度:100 至 2500 mm(可根据要求提供其他长度)
渣帽:钢、铝、纸板
NSH型:B、S、R
EVRAZPRIBOR
Lipeck
生产于: 利佩茨克

EURASCOMB (耶夫拉兹孔布) - TSO
应用:氧气转换器
测量范围:
1 至 2000 ppm O2 - 金属氧化
1400 至 1800°C - 金属温度
0.010 至 0.200% - 碳含量
精度:1554°C 时 0 + 3°C; (5 至 10) mV(取决于氧活度水平)
所选金属模具形状:
圆形:直径34毫米,厚度12毫米
椭圆形:直径34mm,长度42mm,厚度12mm
脱氧剂:无脱氧剂、铝、锆、钛
测量时间:8秒
管长度:100 至 2500 mm(可根据要求提供其他长度)
渣帽:钢、铝、铜、纸板
NSH型:B、S、R
EVRAZPRIBOR
Lipeck
生产于: 利佩茨克

EVRAZKOMB - 三合一
应用:氧气转炉、电弧炉、感应炉、浇包
测量范围:
1 至 2000 ppm O - 金属氧化
1400 至 1800°C - 金属温度
0.010 至 0.200% - 碳含量
精度:1554°C 时 0 + 3°C; (5 至 10) mV(取决于氧活度水平)
所选金属模具形状:
圆形:厚度12mm
椭圆形:厚度12毫米
脱氧剂:无脱氧剂、铝、锆、钛
测量时间:8秒
管长度:100 至 2500 mm(可根据要求提供其他长度)
渣帽:钢、铝、铜、纸板
NSH型:B、S、R
EVRAZPRIBOR
Lipeck
生产于: 利佩茨克

EURASCOMB (耶弗拉兹孔布) – TSC
目的:温度测量、熔融金属取样
应用领域:氧气转换器
测量范围:
1400 至 1800°C - 金属温度
0.010 至 0.200% - 碳含量
精度:1554°C 时 0 + 3°C; (5 至 10) mV(取决于氧活度水平)
所选金属模具形状:
圆形:直径34毫米,厚度12毫米
椭圆形:直径34mm,长度42mm,厚度12mm
脱氧剂:无脱氧剂、铝、锆、钛
测量时间:8秒
管长度:100 至 2500 mm(可根据要求提供其他长度)
渣帽:钢、铝、铜、纸板
NSH型:B、S、R
EVRAZPRIBOR
Lipeck
生产于: 利佩茨克

EURAZSAMP ESU 所需配置的采样
目的:化学、光谱等分析采样
熔融金属
适用范围:感应炉、钢包、金属精加工设备、铸造钢包等。
取样器类型:砂模 - 样品厚度 6 毫米、8 毫米,
10毫米、12毫米
工作温度范围(取决于采样器类型):
从 1150°С 到 2020°С
选择时间:3~5秒
管长度:100 至 1500 mm(可根据要求提供其他长度)
渣帽:钢、纸板、铝
脱氧剂:无脱氧剂、铝、锆、钛
EVRAZPRIBOR
Lipeck
生产于: 利佩茨克

EURAZSAMP ESC 低碳采样
目的:化学、光谱等分析采样
熔融金属
适用范围:氧气转炉、电弧炉、感应炉、脱气机、钢包、浇包等。
采样器类型:带加长杆的陶瓷采样器
工作温度范围(取决于采样器类型):
从 1150°С 到 2020°С
选择时间:3~5秒
管长度:100 至 1500 mm(可根据要求提供其他长度)
渣帽:钢、纸板、铝
脱氧剂:无脱氧剂、铝、锆、钛
EVRAZPRIBOR
Lipeck
生产于: 利佩茨克

EVRAZSAMP ES 所需配置的采样
目的:化学、光谱等分析采样
熔融金属
适用范围:氧气转炉、电弧炉、感应炉、脱气机、钢包、浇包等。
采样器类型:
带模具 - 椭圆形、圆形
工作温度范围(取决于采样器类型):
从 1460°С 到 2020°С
选择时间:3~5秒
管长度:100 至 1500 mm(可根据要求提供其他长度)
渣帽:钢、纸板、铝
脱氧剂:无脱氧剂、铝、锆、钛
EVRAZPRIBOR
Lipeck
生产于: 利佩茨克

采样套装
该套装用于采集粘膜表面、伤口和手术部位的材料,用于卫生学研究的拭子采集,用于制备细菌学和细胞学涂片(用于进一步染色和显微镜检查),以及用于进一步运输和保存样本。
Algimed Tekhno
Minsk
生产于: 白俄罗斯, 明斯克