Каталог

Поиск
48 тов.
Вид:
- Выбрано: 1Применение
- Выбрано: 0Название
- Выбрано: 0Компания
- Выбрано: 0Производство
- Выбрано: 0Дополнительно
Вид:
48 тов.
Система мобильного сканирования АГМ-МС3
Многофункциональный программно-аппаратный комплекс для мобильного и воздушного лазерного сканирования с беспилотных летательных аппаратов (БПЛА).
Основные сферы использования:
› инженерные изыскания;
› создание трехмерных моделей инфраструктурных объектов;
› паспортизация и диагностика состояния автомобильных и железных дорог;
› создание ГИС различного назначения;
› и др.
Вес лазерного сканера для БПЛА составляет 1.5 кг, что позволяет легко установить его на широкий ряд беспилотных летательных аппаратов. Лазерный сканер АГМ-МС3 предназначен для полностью автономной работы с минимальным участием оператора, что делает съемку легкой, быстрой и удобной. Возможность интеграции внешней камеры - от панорамной до тепловизионной, открывает безграничное количество применений.
АГМ Системы
Краснодар
Произведено в: Краснодар
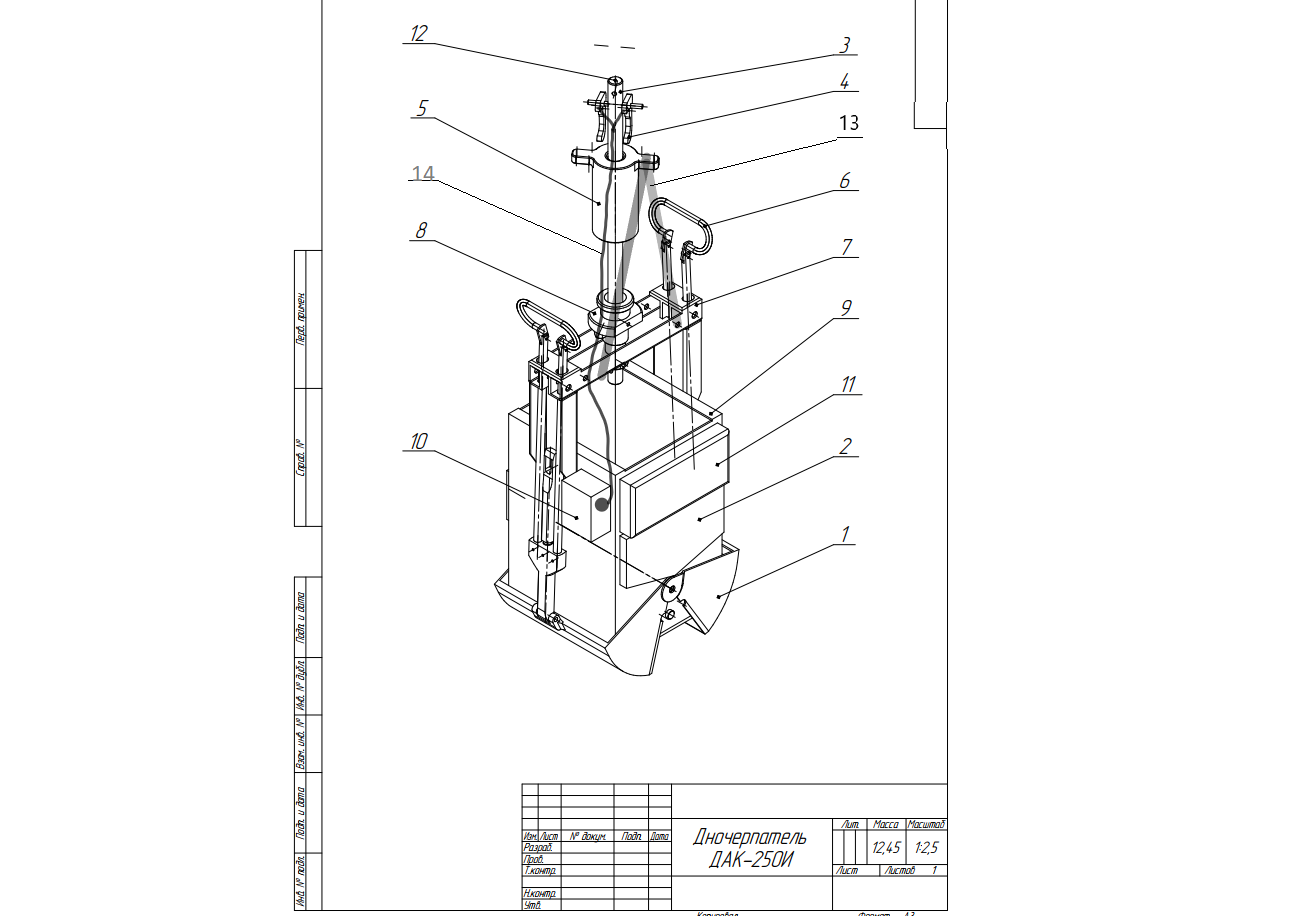
Дночерпатель ДАК-250-И01
от
90 000 ₽
Модернизированный дночерпатель типа ДАК-250 (Эркмана-Берджа) оснащен системой автономного управления и регистрации данных, состоящей из следующих основных компонентов: плата с микроконтроллером (ESP-32) и набором датчиков (акселерометр, батиметрический сенсор, цифровой термометр), исполнительное устройство – сервопривод, литиево-ионный аккумулятор. Также дночерпатель дополняется стабилизирующими гидродинамическими элементами. Взаимодействие с пользователем происходит посредством беспроводного интерфейса bluetooth либо или с помощью ёмкостных кнопок. Все элементы герметизированы и рассчитаны на работу, как в пресных, так и солёных водоемах с глубиной до 300 м. Микроконтроллер, согласно одному из четырех предварительно выбираемых сценариев, по данным с датчиков, определяет момент касания грунта, регистрирует процесс торможения и последующих колебаний прибора (определяются ускорения и вращения по трем осям с частотой 180 Гц с предварительной цифровой фильтрацией и изменение глубины), по их окончанию производит анализ и, в случае корректного заглубления в грунт, автономно дает команду на поворот сервопривода, который запускает обычный механизм срабатывания захватов дночерпателя для взятия пробы, подразумевающий в классическом варианте механическую команду оператора с поверхности (приход груза по тросу). В процессе отбора пробы формируется файл, содержащий информацию: о глубине отбора пробы с точностью до 1 см, углах отклонения дночерпателя от нормали при вхождении в донный грунт, акселерограмму торможения и последующих колебаний дночерпателя в грунте (это позволяет автоматизировать анализ типа/подтипа грунта по создаваемой базе соответствия), а также значения температуры воды на глубинах от дна до поверхности с дискретностью 1 м (измеряется по мере равномерного подъёма); данные сохраняются во флеш памяти микроконтроллера и передаются на борту пользователю посредством беспроводного интерфейса.
Созданная автономная система управления и сбора данных позволяет значительно упростить и ускорить работу по донному пробоотбору дночерпателями типа ДАК-250 (Эркмана-Берджа), гарантировать корректность захвата грунта с заданной площади, проводить работы практически при любых погодных условиях, без обязательной постановки судна на якорь, что, учитывая высокую стоимость работ на акватории, позволяет получить значимый экономический эффект. Прибор работает автономно с использованием обычного троса и лебёдки (возможна работа с ручным погружением/подъёмом), в подавляющем числе случаев работа производится в режиме: «быстрый спуск до дна и последующий подъём с пробой», что значительно снижает требования к квалификации оператора и ускоряет процесс отбора. Система управления совершенно не затрагивает простой и надёжный конструктив дночерпателя, вызывая его срабатывание механической командой (имитирующей приход посыльного груза по тросу в классической конструкции), поэтому существующие многочисленные методики могут быть корректно перенесены на модифицированный прибор.
СПб ФИЦ РАН
Санкт-Петербург
Произведено в: Ярославль, Санкт-Петербург

Аппаратура геодезическая спутниковая многочастотная МР-8
УОМЗ
Екатеринбург
Произведено в: Екатеринбург

Комплекс для оперативного определения составляющих уклонений отвесной линии (астроизмеритель УОЛ, АУОЛ)
Предназначен для определения текущих значений составляющих уклонений отвесной линии в точке размещения в режиме реального времени.
ВНИИФТРИ
Менделеево
Произведено в: Менделеево, Московская область



