目录

搜索
49 商品
类型
- 已选择:用途
- 已选择:名称
- 已选择:公司
- 已选择:原产地
- 已选择:此外
类型
49 商品
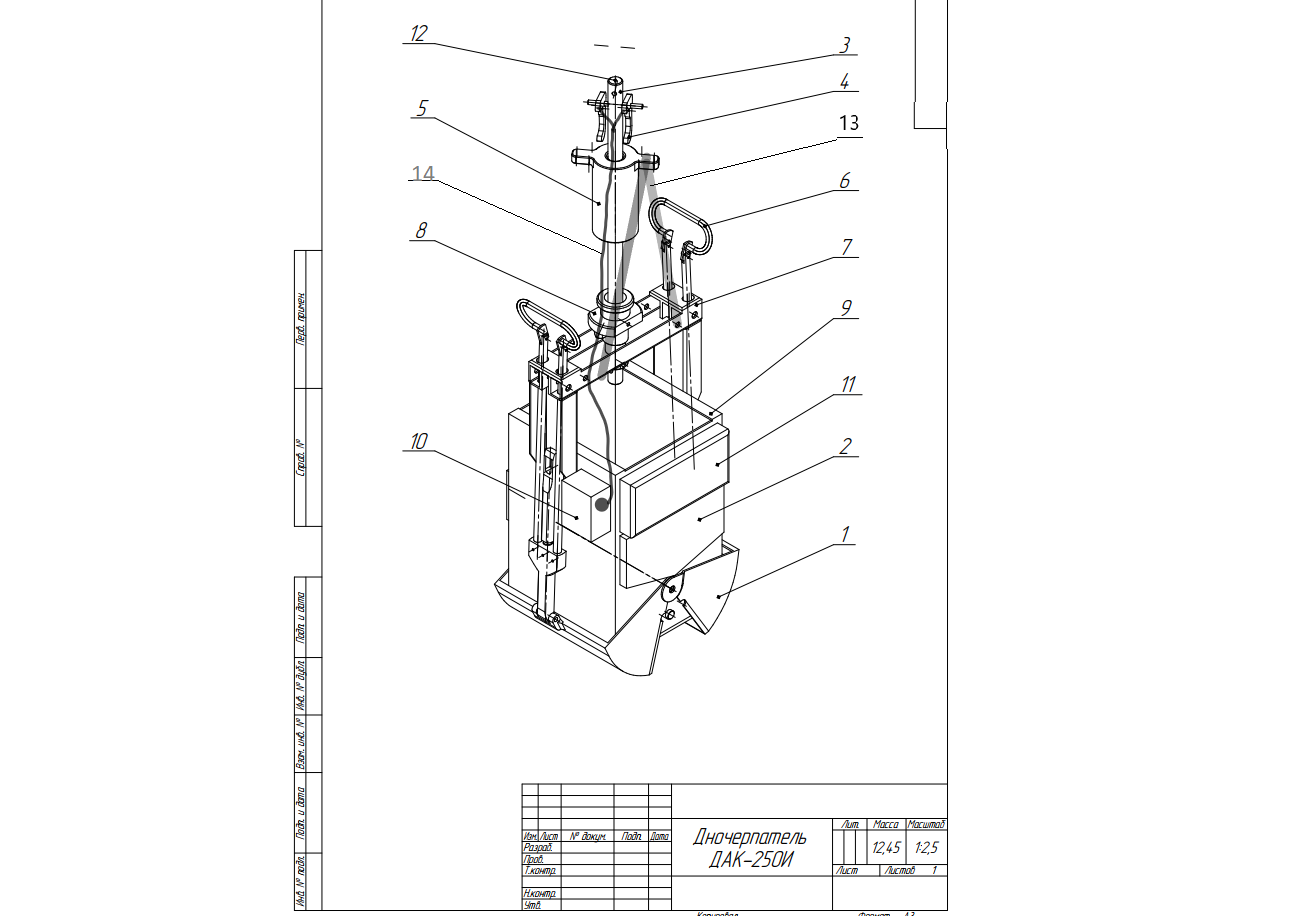
挖泥船DAK-250-I01
从
90 000 ₽
现代化的 DAK-250 型挖泥船(Erkman-Berge)配备了自主控制和数据记录系统,该系统由以下主要部件组成:带微控制器(ESP-32)和一组传感器(加速度计、测深传感器、数字温度计)的电路板、执行器(伺服驱动器)、锂离子电池。挖泥船还配备了稳定水动力元件。通过蓝牙无线接口或电容式按钮与用户互动。所有元件都是密封的,可在水深达 300 米的淡水和海水中使用。微控制器根据预先选择的四种情况之一,根据传感器的数据确定接触地面的时刻,记录设备的制动过程和随后的摆动(以 180 Hz 的频率沿三个轴加速和旋转,并确定初步数字滤波和深度变化),对其进行分析,并在正确埋入地下的情况下,自主发出转动伺服驱动器的指令,从而启动激活挖泥船夹具的常规机制以采集样本,这意味着挖泥船未被使用。在采样过程中,会生成一个包含以下信息的文件: 采样深度(精度可达 1 厘米)、挖泥船进入底层地面时的偏离角度、挖泥船在地面制动和随后摆动的加速度图(可根据创建的对应基础自动分析地面类型/子类型),以及从底层到表面深度的水温值(深度为 1 米,测量为均匀上升); 数据存储在微控制器的闪存中,并通过无线接口传输给船上的用户。
所创建的自主控制和数据收集系统可以大大简化和加快 DAK-250 型挖泥船(Erkman-Berge)的海底取样工作,保证从指定区域采集土壤的正确性,在任何天气条件下都可以进行工作,无需强制船只抛锚,考虑到水域工作的高成本,可以获得显著的经济效益。该设备使用传统的绳索和绞盘自动运行(也可手动下潜/提升),在绝大多数情况下,工作以 "快速下潜到底部,然后提升并取样 "的模式进行,这大大降低了对操作员资质的要求,并加快了取样过程。控制系统完全不影响挖泥船简单可靠的结构,通过机械指令触发(模拟传统设计中绳索上的发送载荷到达),因此现有的多种技术可以正确地转移到改进后的设备上。
SPB FITS RAN
Saint Petersburg
生产于: 雅罗斯拉夫尔, 圣彼得堡




振动计 VVM-311
带有数字指示器的便携式振动计设计用于测量实验室和生产条件下操作设备、机器和其他物体的振动基本参数(振动加速度、振动速度、振动位移)。
VIBROPRIBOR
Yaroslavl
生产于: 雅罗斯拉夫尔

具有电流输出的振动速度传感器 DVST-3
具有电流输出的振动速度传感器 DVST-3 旨在将物体振动速度的均方根值转换为标准的 4-20 mA 电流信号。
VIBROPRIBOR
Yaroslavl
生产于: 雅罗斯拉夫尔

具有电流输出的振动速度传感器 DVST-1
具有电流输出的振动速度传感器 DVST-1 旨在将物体振动速度的均方根值转换为标准的 4-20 mA 电流信号。
VIBROPRIBOR
Yaroslavl
生产于: 雅罗斯拉夫尔



具有电流输出的振动速度传感器 DVST-4
具有电流输出的振动速度传感器 DVST-4 旨在将物体振动速度的均方根值转换为标准的 4-20 mA 电流信号。
VIBROPRIBOR
Yaroslavl
生产于: 雅罗斯拉夫尔

麦克风系统 SM-1
SM-1 麦克风系统旨在用于各种用途的信息测量声学系统。该系统采用的原理是将所研究物体的声音振动转换为与其成比例的电信号,到达测量仪器。
VIBROPRIBOR
Yaroslavl
生产于: 雅罗斯拉夫尔